Lukiolaisten robotiikkakurssi Ilmaisinlaboratoriossa
Fysiikan tutkimuslaitoksen Ilmaisinlaboratorio on tarjonnut jo kahtena perättäisenä vuonna tilojaan naapurissamme sijaitsevan Helsingin luonnontiedelukion kurssille, jossa opiskelijat kokoavat ryhmissä itseohjautuvia vesiliitureita. Koulu on hankkinut kurssilaisille RoboNationin SeaGlide kokoamissarjan, joka sisältää ohjeet ja osat liiturin kasaamiseen. Liituri toimii männällä, jolla voidaan imeä laitteen säiliö täyteen vettä. Tällöin liituri painon lisääntyessä se sukeltaa ja vastaavasti säiliön tyhjentäminen saa laitteen nousemaan pintaan. Männän liikettä ohjataan Arduino mikro-ohjaimeen syötetyllä koodilla.

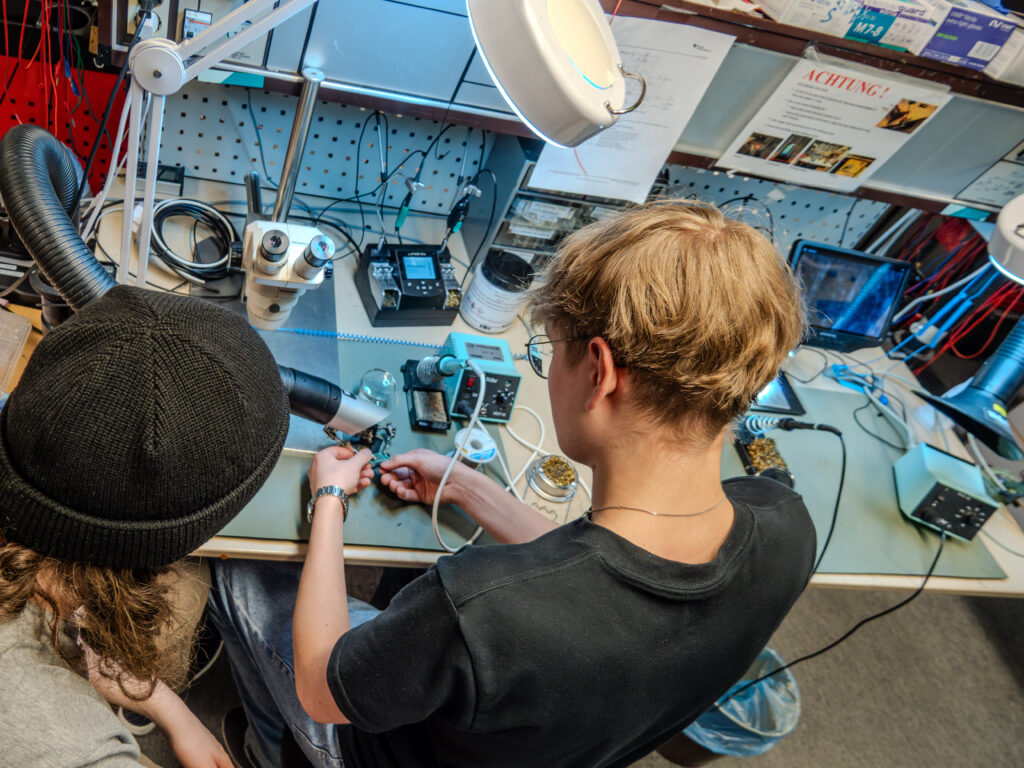
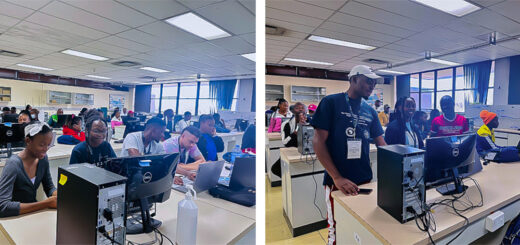
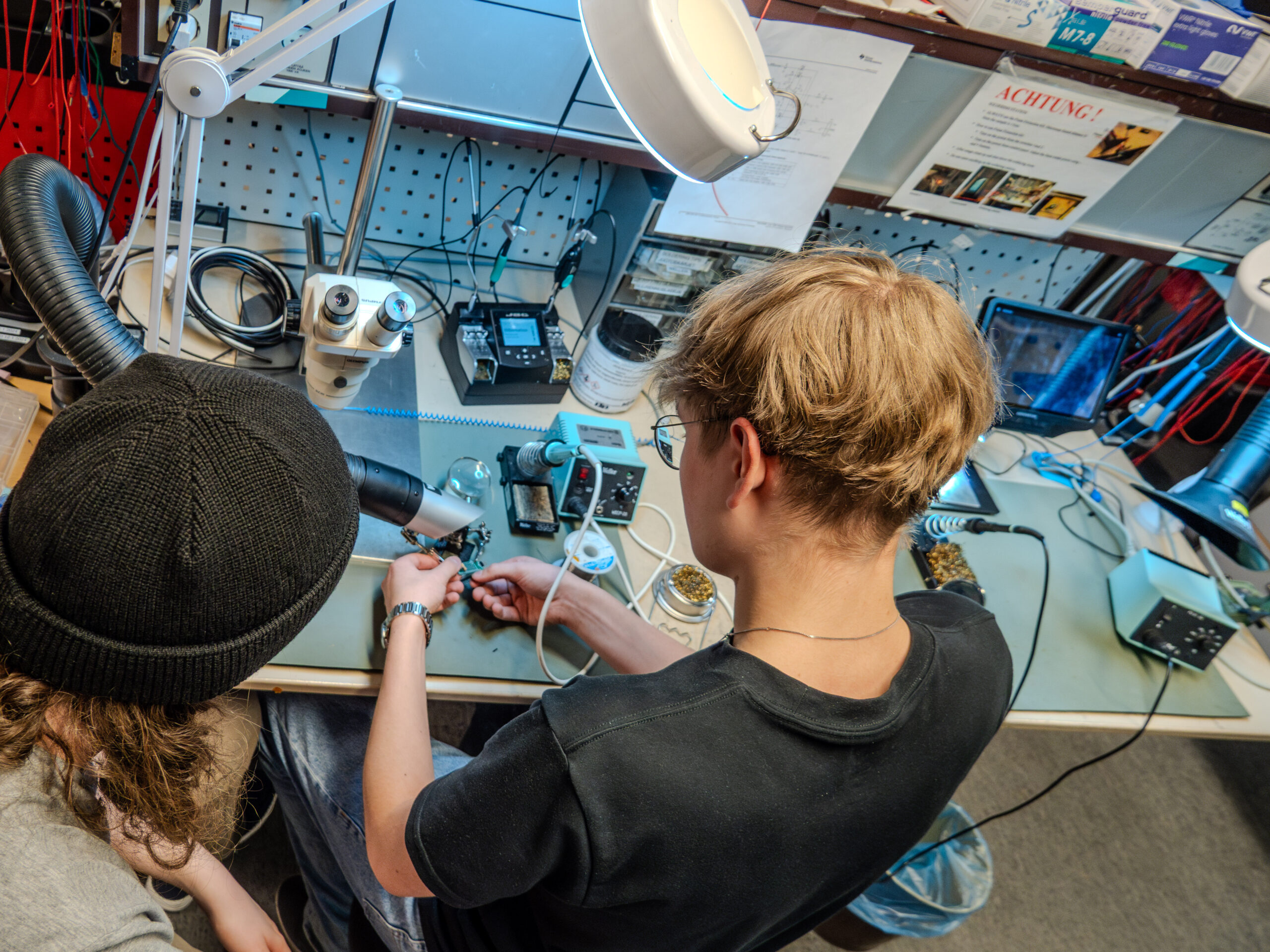
Kurssilla opiskelijat suunnittelevat laitteen kokoamisen, juottavat komponentit, sekä ohjelmoivat laitteiston. Laboratorion tiloja tarvitaan erityisesti juotosvaiheessa, koska vastaavia tiloja ei ole tarjolla lukiossa. Ohessa viime keväänä kurssille osallistuneen Einarin näkemys tapahtumista. Kaikki loput kuvat ovat Einarin ottamia.
Tämä teksti on kokoelma siitä, mitä teimme TTK03-kurssilla (Helsingin luonnontiedelukion tietotekniikkakurssi: Elektroniikka ja robotiikka).
Ensimmäisellä tunnilla tutustuimme muihin ryhmäläisiin, ja valitsimme keiden kanssa kasaisimme Sea Glide -vesiliiturimme. Ryhmät valittuamme tarkistimme myös kittien sisältämät osat, jotta kaikki ohjeessa mainitut löytyisi.
Toisella pidetyllä tunnilla käytiin tutustumassa yliopiston tiloihin, ja kuultiin turvallisuusohjeet sekä aloiteltiin hieman kolvaamista. Yliopiston tilat olivat käytössämme vain tiistaisin, joten torstaisin tehtiin sitä, mitä voitiin. Tätä rataa kuljettiin uittopäivään 26.5 asti.
Kasaaminen
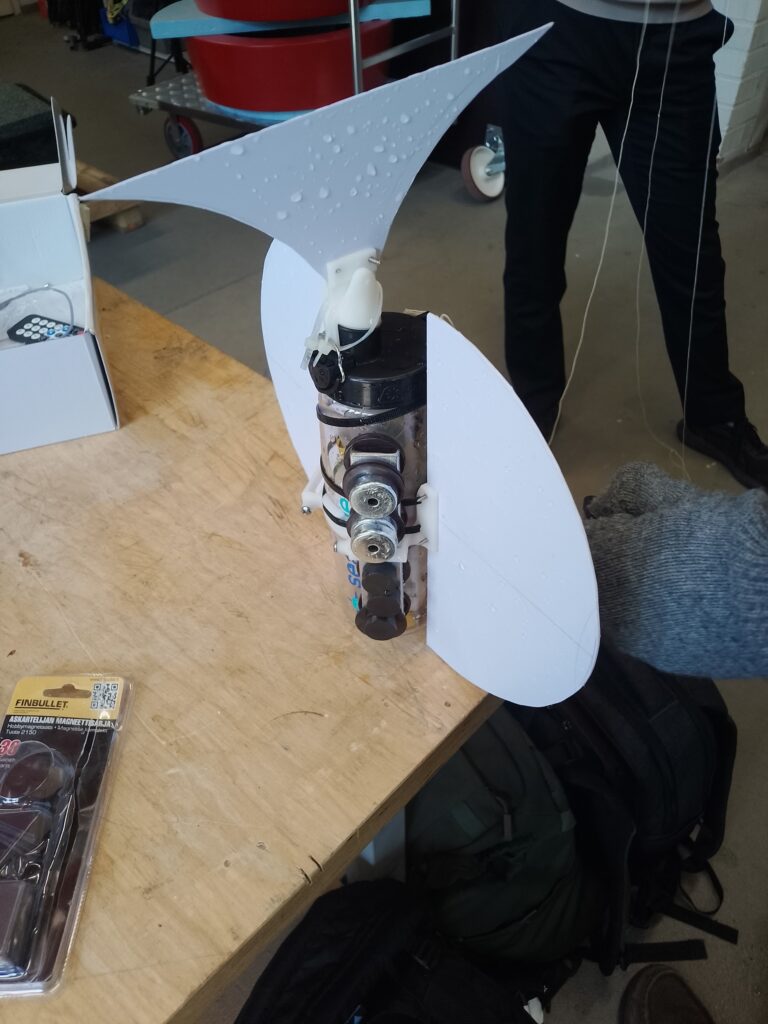
Projektin ensimmäinen vaihe oli virtalähteen kasaaminen. Siinä on kolme osaa; 9V patterin liitin, virtakytkin ja kondensaattori. Tämä vaihe oli suhteellisen helppo ja sujui hyvin. (Kuvassa glideri ilman toista painoa)
Projektin toinen vaihe oli rajoittimen kasaaminen. Rajoitinta tarvitaan siihen, että servo, joka siirtää painolastia (vettä) sisään ja ulos liitimestä, ei ylirasita itseään, kun maksimi painolastille on saavutettu. Rajoittimeen tarvittiin yksinkertainen kytkin ja hieman johtoja.
Kolmantena vaiheena oli ilman työkaluja suoritettavissa oleva vaihe, kellukemoottorin kasaaminen. Tätä varten tarvittiin painolastia, muovinen lääkeruisku, ruuvi, pultti, muovinen painolastin pidin, sakset ja ruuvilevy. Aluksi ruiskusta leikattiin pois päädyn pitimet ja irrotettiin tiiviste ruiskusta. Tämän jälkeen painolastipitimeen laitettiin painolastia ja pultti sulkemaan sen. Tämän jälkeen aiemmin mainittu tiiviste kiinnitettiin painolastiin ja sijoitettiin ruiskuun. Viimeisenä ruuvi, joka on kiinni servossa, kierrettiin aiemmin mainittuun pulttiin, jotta painolastia voi liikuttaa.
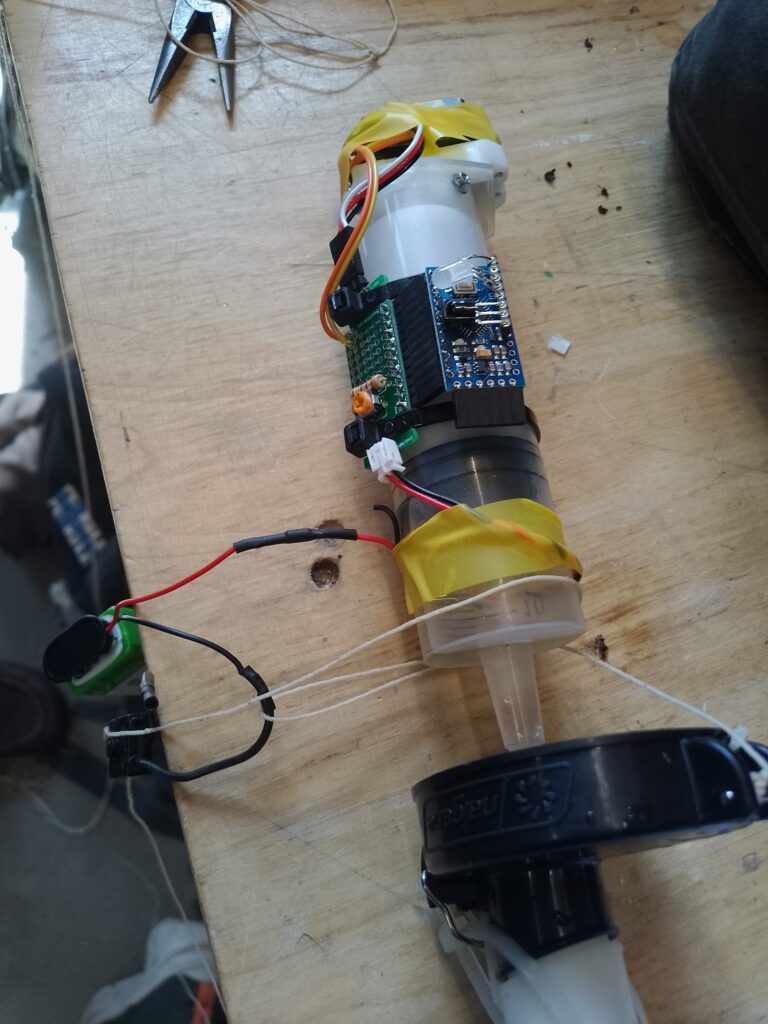
Neljäntenä vaiheena kasattiin kellukemoottorin ohjausyksikkö. Tässä työvaiheessa kolvattiin toisiinsa Arduino Pro Mini ja piirilevy sekä niiden lisäosat. Intensiivisessä kolvauspuuskassa lisättiin myös LED-valo ja IR-vastaanotin. Täten saatiin “komentokeskus”.
Viidennellä, ja lähes tulkoon viimeisellä, vaiheella kiinnitimme kasaamamme osat kiinni vesipullon korkkiin vesitiiviisti. Korkissa oli reikä, josta ruiskun vesi pääsee kulkemaan. Kun komponentit oli kiinnitetty korkkiin, kasattiin sukeltaja loppuun.
Kuudentena vaiheena asensimme valmiiksi mukana tulevat ohjelmistot AMP:hen (hieman muokattuina) ja tarkistimme, että elektroniikka toimii ja säiliö on vesitiivis.
Uittaminen

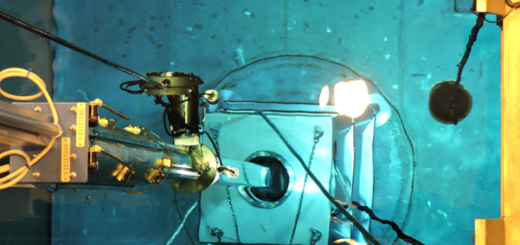
Kun kohtalokas uittopäivä tuli, oli sää aurinkoinen. 26.5.2025 tuuli oli lämmin ja suuntasimme kokeen jälkeen Aalto-Yliopistoa kohti. Uittaminen suoritettaisiin heidän arktisessa tankissansa.
Kiinnitimme glideriimme narun, jotta ongelmatilanteissa saisimme sen ylös jäätävästä tankista, ja hyvä näin. Ensimmäisellä uittokerrallamme glideri oli liian painava, ja täten se lähti hitaasti mutta varmasti kiihdyttämään kohti pohjaa. Siivekkeiden ansiosta glideri pääsi kiihdyttämään, mutta edes painolastin purkaminen ei nostattanut laitetta pohjasta, noin kolmen metrin syvyydestä.
Toisella yrityksellä olimme poistaneet yhden 180 grammaa painavan rautatangon ja kiinnittäneet noin 90 g magneetteja kapineeseen. Veteen laskiessa huomattiin, että vakavaa epätasapainoisuutta lukuun ottamatta, mitään ei tapahtunut. Kapine kellui vain pinnalla. (Kuva yläpuolella tästä yrityksestä)
Muutamien hienosäätöjen ja usean yrityksen jälkeen laskimme jälleen masiinan veteen. Tällä kertaa liituri kaarsi jyrkästi oikealle koko ajan epätasapainon takia, mutta se nousi ja laski niin kuin piti. Tämä jäikin viimeiseksi onnistuneeksi uitoksi.
Seuraavilla yrityksillä siipien tukirunko katkesi, painolasti tippui pohjaan, servo väsyi, akku loppui ja kermana kakun päälle kolvaus petti ja laite hajosi. Hyvä oli elämä sukeltajalla kuin se kesti.
Kaiken kaikkiaan sukeltajan rakentaminen ja säätäminen oli erittäin hauskaa ja tekisin mielelläni uudelleenkin. Kurssilla oppi erittäin hyödyllisiä kykyjä sähkötekniikasta.
Kursille osallistunut Einari
ja
Matti Kalliokoski
Yliopistotutkija
Fysiikan tutkimuslaitos